
El objetivo consiste en implementar un planificador de tareas basado en prioridades y con capacidad de desalojo (Primitive Rate-Monotonic), esto se implementa utilizando el sistema operativo en tiempo real RTX ejecutando Windows NT como máquina virtual.
Con carácter extra implementé la misma práctica pero sobre Windows XP, es decir, no en tiempo real. Además capacité al programa de un interfaz gráfico para reflexionar sobre el planificador.
La descarga include la siguiente información: descripción de la práctica en formato pdf, código fuente para Windows y MS-DOS.
€1,99
Description
En la siguiente ilustración se presenta el formulario del programa, con la idea de construir el planificador. Existen tres tareas, y el hiperciclo es el siguiente: 1221331__, 1221331__, 1221331__.
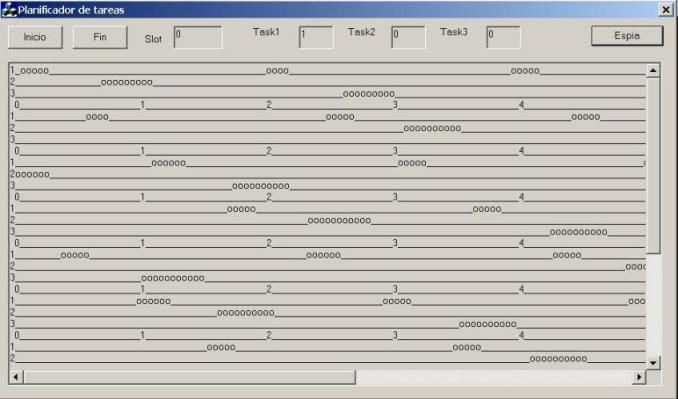
Podemos apreciar el botón de inicio y final de ejecución del hiperciclo, el slot de ejecución actual, y un cuadro de texto indicando cuando se está ejecutando cada tarea. En el cuadro principal está la representación gráfica de la ejecución de cada tarea, mediante el símbolo ‘o’. Obsérvese que coincide con el hiperciclo inicial.
La descargar incluye la práctica del planificador de tareas basado en MS-DOS. Por un lado incluye la clase base de tiempos (BT_V1.h), que programa el chip RTC de la placa base para generar un periodo de interrupción. Mediante la clase planificadora (SCH_V1.h) se lanza la ejecución de cada tareas según dictamine el vector de hiperciclo. Finalmente el archivo principal (MAIN_P2.CPP) realiza las inicializaciones, adquisición de datos y presentación de la información del espía de tareas.
Skip to PDF content

Reviews
There are no reviews yet.